Za generację dźwięku w Amidze, odpowiedzialny jest układ Paula. Układ ten posiada dwa analogowe wyjścia audio - kanał lewy i prawy. Rozdzielczość ADC to 8-bitów.
Dodatkowo istnieją jakieś tryby kiedy jeden kanał moduluje częstotliwość lub/i amplitudę drugiego. W takim trybie możliwe jest uzyskanie sygnału o 14-bitowej rozdzielczości. Na pewno jest to bardzo rzadko wykorzystywane, nie jestem pewny czy WinUAE to nawet emuluje. Gry z tego nie korzystają, ewentualnie jakieś programy muzyczne. Na razie tymi trybami się nie przejmuje.
Paula wewnętrznie posiada 4 kanały, po dwa na każdy kanał stereo.
Amiga to komputer, którego działanie silnie zależy od zegara taktującego. Cały proces generacji obrazu, dźwięku odbywa się w takt zegara. Ponieważ obraz generowany jest w PAL i NTSC dla obu systemów mamy inne zegary taktujące, odpowiednio $FREQ_{PAL} = 7093790$, $FREQ_{NTSC} = 7159090$. Stąd wynika maksymalna częstotliwość sygnału jaką Paula jest w stanie wygenerować: połowa powyższego.
Z uwagi na czas w jakim powstała Amiga zastosowanie DSP nie było możliwe. Mimo to Amiga radzi sobie z generacją zdigitalizowanego dźwięku, ale odbywa się to kosztem jakości.
Paula generuje sygnał o maksymalnej częstotliwości około 3.5 MHz, który jest filtrowany i wzmacniany.
Paula w każdej linii pobiera 4 16-bitowe słowa, czyli po dwie próbki na każdy z 4 kanałów. Ponieważ moment uzyskania dostępu do pamięci w linii ekranu nie jest ustalony Paula posiada bufor 2x4 bajty. Kiedy 4 próbki są odtwarzane, 4 kolejne mogą zostać załadowane.
Częstotliwości wyświetlania obrazu są następujące:
$FPS_{PAL} = 50$
$FPS_{NTSC} = 59.94$
Liczba linii ma klatkę w obu systemach:
$LINES_{PAL} = 625/ 2$
$LINES_{NTSC} = 525/2$
525 i 625 to liczba linii w przeplocie czyli na dwie klatki.
Stąd możemy policzyć ile maksymalnie próbek na sekundę w obu systemach jest w stanie pobrać i wygenerować Paula:
$SAMPLESMAX_{PAL} = 2 * LINES_{PAL} * FPS_{PAL} = 31250$
$SAMPLESMAX_{NTSC} = 2 * LINES_{NTSC} * FPS_{NTSC} = 31468.5$
2 to liczba próbek na kanał jakie maksymalnie może Paula pobrać z pamięci podczas jednej linii.
Tutaj trochę mi mieszają. Zgodnie z dokumentacją liczba próbek została ograniczona do $SAMPLESMAX = 28867$.
Tak więc teraz możemy policzyć co ile minimalnie cykli może się zmienić odtwarzana próbka by zachować to kryterium:
$CYCLESPERSAMPLE_{PAL} = FREQ_{PAL} / SAMPLESMAX / 2 = 123$
$CYCLESPERSAMPLE_{NTSC} = FREQ_{NTSC} / SAMPLESMAX / 2 = 124$
2 gdyż, częstotliwość procesora to jedno, a cykle to drugie. CPU posiada 16-bitową magistralę danych, zaś operuje na słowach 32-bitowych, czyli dostęp do każdej danej zajmuje mu dwa cykle zegarowe.
Paula posiada rejestr 16-bitowy definiujący przez ile cykli może być utrzymywana próbka na wyjściu. Jeśli wartość jest mniejsza od minimalnej nie ma gwarancji, że następna próbka zostanie uzyskana na czas. Odtwarzana jest wtedy próbka poprzednia.
Z pewnością jest tutaj jeszcze wiele problemów do rozwiązania. Skąd te 28867. Choć liczba linii w PAL to 625 maksymalna rozdzielczość to 400 linii. Reszta linii tworzy ramkę. Co się konkretnie dzieje jak nie mamy następnej próbki, a następną trzeba odtworzyć, co się dzieje jak właściwa próbka nadejdzie, czy następuje jakaś desynchronizacja.
Z drugiej strony możemy policzyć minimalną częstotliwość z jaką może być odtwarzany dźwięk. Zakładamy, że w rejestr jest wpisana wartość 63355.
$SAMPLESMIN_{PAL} = FREQ_{PAL} / 65535 / 2 = 54$
$SAMPLESMIN_{NTSC} = FREQ_{NTSC} / 65535 / 2 = 55$
Wartości te to ilość próbek generowanych na sekundę. Taka liczba próbek pozwala odtworzyć sinusoidę o częstotliwości 27 i 27.5. Z drugiej strony maksymalna częstotliwość to 14.4Khz. Człowiek jest w stanie usłyszeć dźwięki od około 20 do 20000Hz. 14.4KHz to ciągle jest dużo, gdyż 200000 to bardziej wartość teoretyczna.
Generowanie jednokanałowego dźwięku z maksymalną częstotliwością wymaga strumienia danych rzędu 28KB na kanał.
Przypuśćmy, że mamy zarejestrowaną próbkę jakiegoś instrumentu z tą częstotliwością. I chcemy ją odegrać na niższym tonie. Odtwarzamy więc ją wolniej wpisując do rejestru wartość większą niż 124. Konkretna wysokość tonu zależy od częstotliwości z jaką dźwięk został zarejestrowany.
Normalnie współcześnie melodia, efekty dźwiękowe są przygotowane w postaci strumienia WAV (MP3). Na Amidze z uwagi na wielkość pamięci maszyn z tamtych czasów nie było technicznie możliwe by odtwarzać muzykę jako WAV.
Próbki instrumentów były rejestrowane każdy z osobna, a następnie odtwarzane z wybraną częstotliwością na 4 kanałach (4 głosowa polifonia).
W tamtych czasach nie było praktycznie możliwe użycie DSP to konwersji częstotliwościowej próbki. Było to zbyt drogie. CPU był o wiele za wolny na tą operację. Taka konwersja, czyli resampling, to proces podczas którego zmieniamy częstotliwość sygnału i jednocześnie filtrujemy dolno-przepustowo sygnał by wyeliminować zjawisko aliasingu. Z braku takiego układu dźwięk generowany jest zniekształcony.
Częściowo można temu zaradzić przygotowując więcej niż jedną próbkę o kilku pośrednich częstotliwościach. Prawdopodobnie było to rzadko używane w grach, ale częściej przy odtwarzaniu modułu.
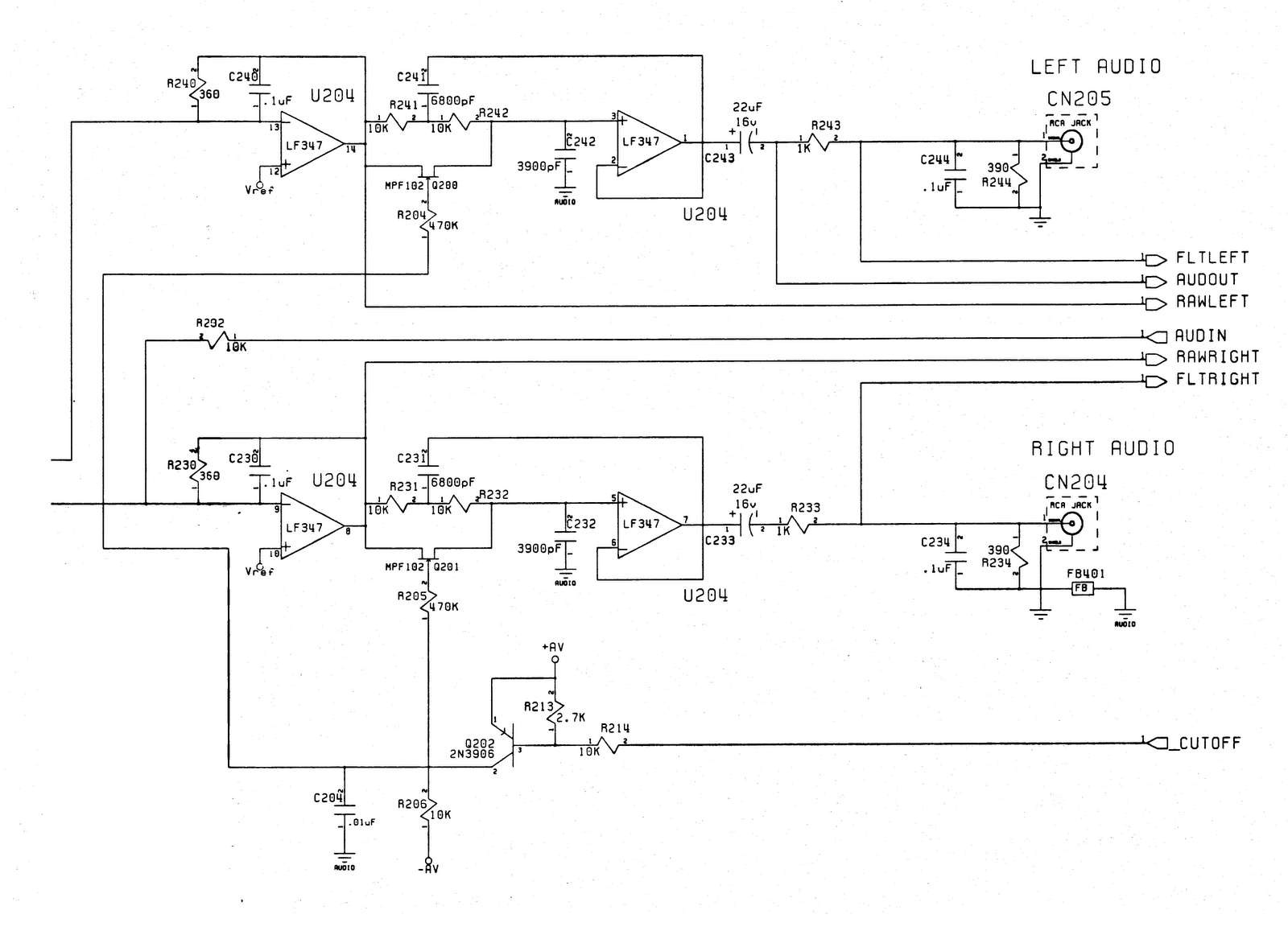
Rozwiązaniem problemu było filtrowanie sygnału. Każdy kanał z osobna. Filtr taki składał się z kaskadowo połączonych dwóch filtrów, jeden z nich włączony na stałe, drugi włączany programowo. Filtry te i ich parametry zostaną omówione później.
Z uwagi na to, że filtr włączony na stałe ma częstotliwość odcięcia 4.4KHz, generalnie nie jesteśmy w stanie usłyszeć niczego powyżej 7KHz. Z tego powoduje próbki powinny być rejestrowane z częstotliwością wyższą niż 14KHz. Czyli pomimo tego, że teoretycznie maksymalna częstotliwość jaką jesteśmy w stanie wygenerować to 14KHz, filtr ucina wszystko co jest powyżej 7KHz. Związku z tym (za dokumentacją) dla próbkowania większego niż 320 (4KHz) cykli zaczynamy gubić generowane wyższe częstotliwości.
Ich zadaniem jest eliminacja aliasingu, który charakteryzuje się w przypadku dźwięku z Amigi zakłóceniami na wysokich częstotliwościach.
Każdy z czterech kanałów jest wyposażony w 6 bitową regulację głośności.
Mimo wszystko było to prawdopodobnie wszystko co najlepsze co dało się uzyskać w tamtych czasach.